



















Automatic Tire Positioning and Grasping

Detection Requirements:
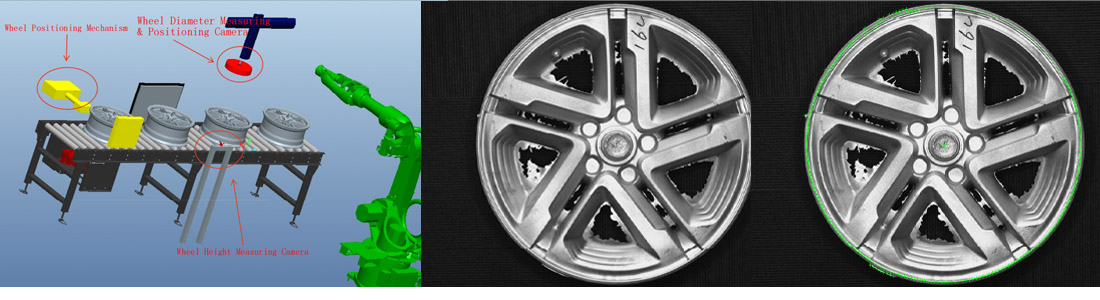
1, The 3D vision system guides robots in recognizing various tire types for grasping
2, Imaging Range: 850 mm x 700 mm
3, Accuracy: 0.34 mm
Project Details:
With the advancement of technology and societal progress, the quality of life has steadily improved. As people venture out more frequently and rely increasingly on transportation, the demand for automobiles as everyday conveyances has surged significantly. Tires, being the core components of vehicles and consumable goods, are witnessing a persistent upward trend in demand. Given the substantial tire requirements from manufacturers and the downstream market, the efficiency of tire production and transport has become paramount.Traditionally, tire sorting has largely relied on manual handling. Due to the tires' considerable size (ranging from 600 to 800 mm) and weight (between 9 to 70 kg), workers expend considerable time and effort in the sorting process, leading to highly variable efficiency. As tire demand escalates, the volume of orders has increased sharply. Coupled with the diverse performance styles available, traditional manual sorting methods can no longer meet warehouse order demands.
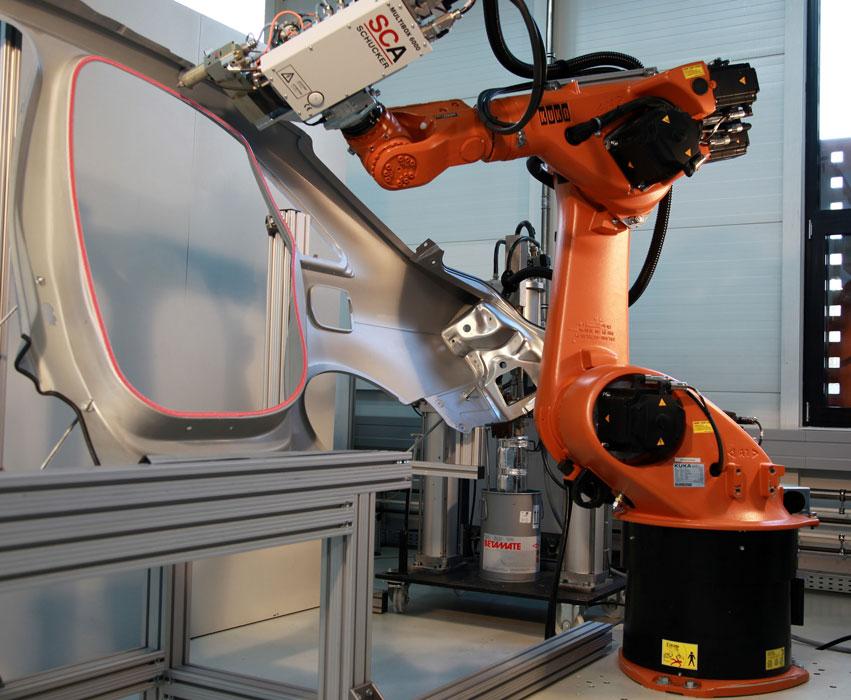
The 3D machine vision-based tire sorting system captures images of tires on pallets or cargo frames and, after obtaining the tire point cloud information, outputs the coordinates for grasping, guiding the robotic system to perform automated tire sorting operations. This system can accommodate 24-hour dispatch requirements, handling over 1,600 tires per hour, significantly enhancing sorting efficiency and nearly doubling production capacity. By implementing this system, the formerly labor-intensive tasks have been transformed into highly automated operations, liberating sorting workers from arduous physical labor and reallocating them to more critical tasks that require human intervention, thereby adding value to warehouse operations.
Related Solutions




Related Products
-

Dual Spectrum Thermal Compact Camera
Dual Spectrum Thermal Compact Camera, 2MP Visual and 256x192 IR Resolution, ≤45mK@30℃NETD, Temp Range -20℃~550℃, IP67 Casing.More
-

AI Series Vision Controller
Intel® Core™ i7-12700 machine vision processor with AI-specific I/O, real-time control, and expandable designMore
-

AI Series Vision Controller
Intel® Core™ i7-12700 machine vision processor with AI-specific I/O, real-time control, and expandable designMore
-

AI Series Vision Controller
Intel® Core™ i7-12700 machine vision processor with AI-specific I/O, real-time control, and expandable designMore
-

AI Series Vision Controller
Intel® Core™ i7-12700 machine vision processor with AI-specific I/O, real-time control, and expandable designMore
-
AI Series Vision Controller
Intel® Core i7-12700 Machine Vision Computer with Vision-Specific I/O, Real-Time Control, and Expandable DesignMore